
Modeling, Guidance & Control of a Quadcopter
Published by:
Category: Flight Controls, Quadcopter Drones, Modeling & SIm
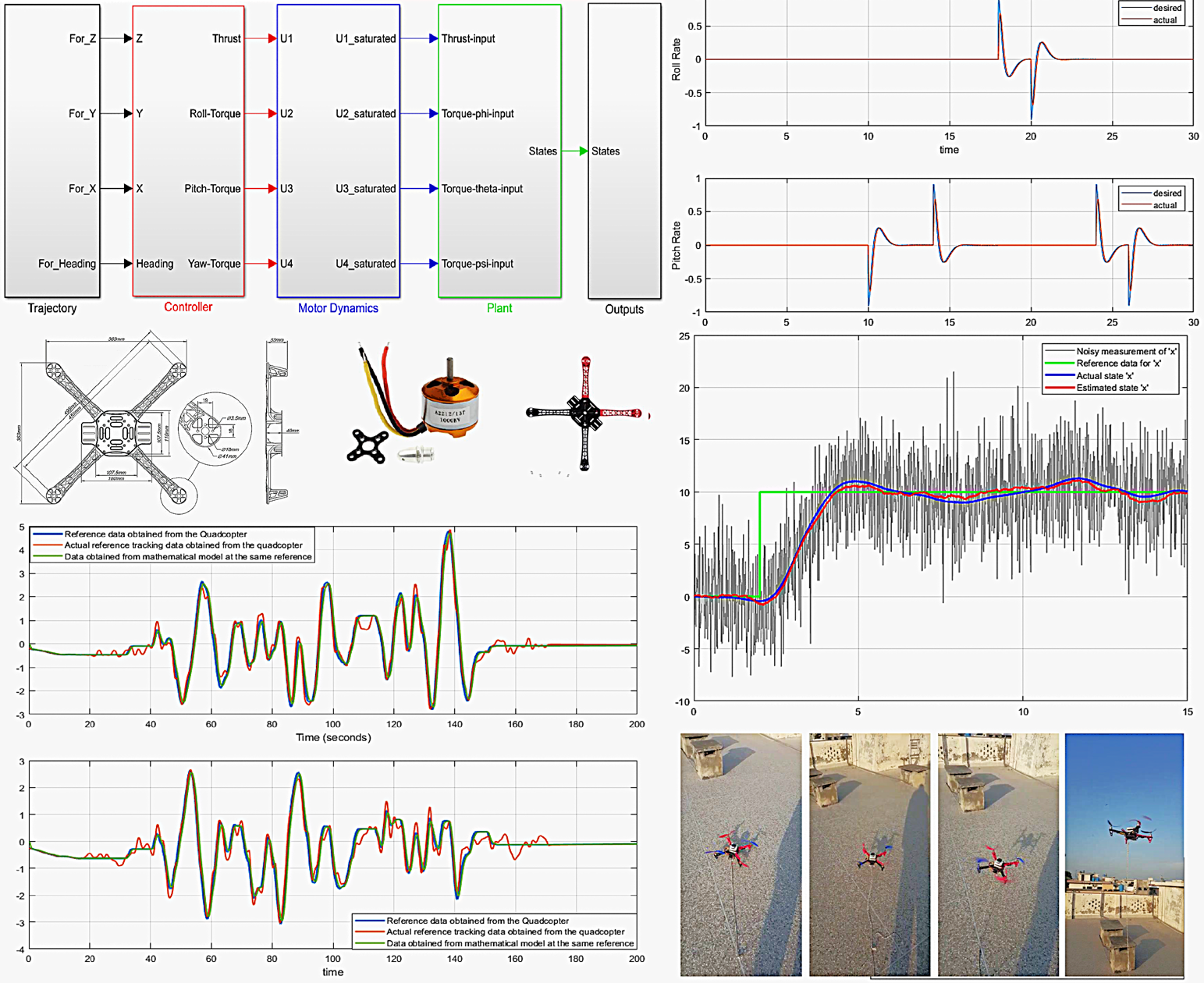
We successfully executed a project focused on the development and validation of guidance and control strategies for a quadcopter, utilizing both theoretical and practical approaches. Our team began by reproducing and understanding mathematical models of a quadrotor from existing literature. We explored two key mathematical frameworks: the Newton-Euler setup and a model derived from Newton's second law. A linear version of the latter was developed to analyze both models for controllability and observability characteristics. For control strategy development, we implemented two primary approaches. First, a cascaded PID controller was designed based on the linearized quadcopter model, which was later tested on the more complex nonlinear dynamics. The second approach explored optimal control, specifically the Linear Quadratic Regulator (LQR) and its extension, the Linear Quadratic Integrator (LQI), to handle reference tracking in the linear model. Additionally, to mitigate the impact of faulty measurements, we introduced Linear Quadratic Gaussian (LQG) control. The project also included the development of a virtual reality environment using MATLAB�s V-Realm 2.0 to simulate the quadcopter�s behavior, providing an immersive testing ground for nonlinear simulations. After thorough virtual testing, we assembled a physical quadcopter model and re-evaluated the PID gains, adjusting them to match the physical system's parameters. The Mission Planner codebase was then employed to transfer the optimized PID gains from simulations to the physical quadcopter. Finally, flight data from the physical model was collected and compared against the simulated results to verify the accuracy of the modeling, control, and guidance systems. The project concluded with the successful validation of these models, demonstrating the quadcopter�s ability to perform waypoint-based guidance missions, ensuring the reliability of the control parameters.
Don't Miss Any Opportunity Contact us anytime.